DOBOT SMB 300XS
Manipolazione Mobile Autonoma per Soluzioni Industriali
Affidabilità
L'algoritmo SLAM laser integrato garantisce un'eccezionale precisione, raggiungendo una ripetibilità fino a ±5 mm e una precisione di posizionamento relativa entro ≤ ±2 mm. Ciò garantisce un coordinamento fluido tra manodopera, macchinari e carico, migliorando significativamente l'efficienza logistica.

Espandibilità
Progettato con una struttura altamente modulare, l'AMMR si integra senza sforzo con robot collaborativi (cobot), robot mobili autonomi (AMR), telecamere e pinze. È compatibile con tutti i cobot della serie DOBOT CR, i principali sistemi di visione 2D/3D e le pinze di terze parti. È disponibile una gamma diversificata di accessori per supportare varie esigenze di trasporto e operative.

Distribuibilità
Una singola piattaforma software semplifica l'intero processo di configurazione, includendo la creazione di mappe, la definizione dei punti di interesse, la pianificazione del percorso, la calibrazione del robot e la configurazione dei compiti. Inoltre, un sistema di gestione delle risorse integrato snellisce le operazioni, e la connettività senza soluzione di continuità con il MES migliora l'efficienza complessiva.
Protezione Potenziata con Caratteristiche di Sicurezza Avanzate
- Monitoraggio della Velocità: Doppi encoder tracciano continuamente il movimento e la velocità di rotazione, arrestando automaticamente i motori se vengono superate soglie predefinite.
- Limite di Sicurezza: Sensori di prossimità rilevano l'arrivo alla destinazione e fermano il robot per prevenire collisioni.
- Zona di Sicurezza: Doppi sensori LiDAR eseguono una scansione a 360 gradi, identificando zone di sicurezza definite dall'utente per una protezione ottimale.

Calibrazione Accelerata con Sensori Visivi
Un kit visione opzionale dispone di un processo di calibrazione proprietario 2.5D e di un algoritmo di posizionamento visivo per la compensazione spaziale, garantendo un'accuratezza di posizionamento di 0.5 mm. La calibrazione può essere eseguita manualmente o automaticamente in soli tre passaggi utilizzando la programmazione grafica senza codice. Il kit supporta anche la misurazione, la scansione di codici QR e il riconoscimento di lettere, consentendo una vasta gamma di applicazioni basate sulla visione.

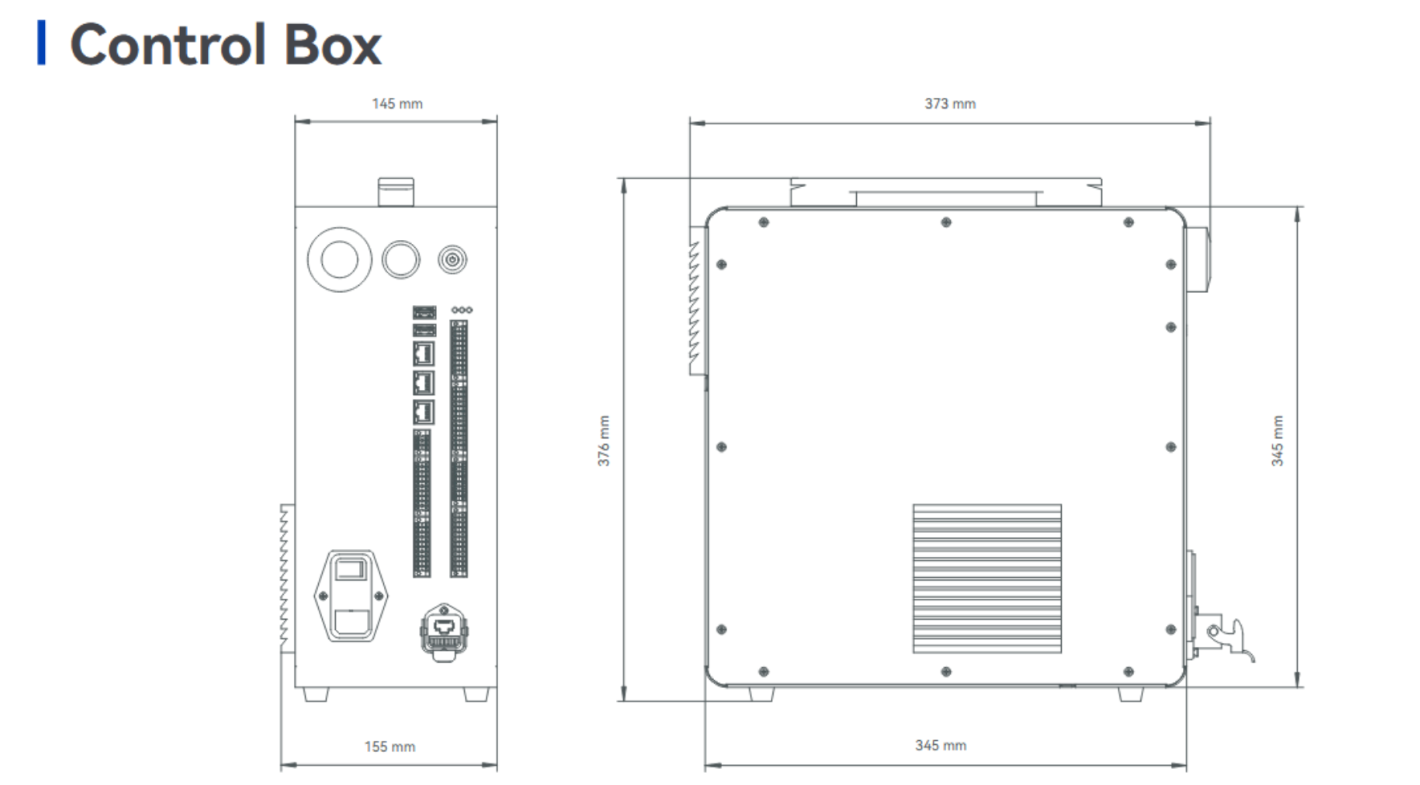
Dimensioni del prodotto

Specifiche
```html
| Modello
``` | amb-300xs ```html
|
Parametro
``` | Metodo di Navigazione | Laser SLAM |
Modalità Guida | Differenziale a due ruote |
Colore del guscio | Bianco perla |
Dimensione (senza bracci robotici) | 845mm×585mm×700mm |
Parametro di Rotazione | 980mm | |
Peso (con batteria) | 120kg |
Capacità di carico | 300kg |
Larghezza Minima del Corridoio | 725mm |
Precisione di Navigazione | +/-5mm, +/-5° ```html
|
Velocità di navigazione
``` | ≤1,5m/s ```html
|
Area della Mappa
``` | 200 000m2 ```html
|
Batteria
``````html
| Specifiche
``` | 48V, 40Ah (Batteria al litio) |
Resistenza | 8h ```html
|
Tempo di ricarica
``` | ≤2.5h ```html
|
Metodo di ricarica
``` | Manuale / automatico / ricarica rapida ```html
|
Interfaccia estesa
``` | Potenza DO | Tre vie (capacità di carico totale di 24V/2A) |
DI | Undici vie (PNP/NPN) ```html
|
Superficie di Arresto d'Emergenza
``` | Uscita bidirezionale |
Interfaccia di Rete | Rete cablata | Rete Gigabit 2 vie M12 X-Code |
Rete Wireless | WI-FI 802.11 a/b/g/n/ac ```html
|
Pannello di Controllo
``` | Numero di LiDAR | 2 (SICK nanoScan3) |
Pulsante di Emergenza, Cicalino, Luce Ambientale, Bordo di Sicurezza | Sì |
Display HMI | No |
Ambiente di Lavoro | Temperatura Ambiente | 0° a 50°C. 10% a 90% non-condensante |
Classificazione IP | IP20 |
Certificazione | ISO 3691-4 | Sì |
EMC/ESD, UN38.3, RoHS, REACH | Sì |
Camera Pura | Classe ISO 5 |
Questo prodotto funziona con la serie CRA, da CR5A a CR10A. Ma il braccio robotico non è incluso nel pacchetto!
DOBOT CR5A
Braccio robotico industriale collaborativo con raggio d'azione di 900 mm e capacità di carico di 5 kg
La serie di bracci robotici collaborativi Dobot CR è stata utilizzata per automatizzare molti flussi di lavoro industriali nel corso degli anni. Che si tratti di pallettizzazione, saldatura o assemblaggio, troverai la soluzione più ottimale per la tua applicazione nella serie CR (CR3, CR5, CR7, CR10, CR12, CR16).
Tuttavia, l'industria può essere soggetta a condizioni estreme in cui si richiedono operazioni pesanti, rapide e conformità a rigide normative di sicurezza.
In risposta a queste esigenze, Dobot ha creato l'ultima generazione dei suoi bracci robotici collaborativi, la serie CRA, che incorpora i vantaggi dei cobot e porta i loro parametri di prestazione a nuovi livelli. Ma cosa fornisce il nuovo impulso per un design senza tempo?
Migliorata l'architettura interna e la velocità

Grazie alla nuova generazione di motori servo interni e agli algoritmi dinamici innovativi, la velocità angolare degli assi è aumentata del 25%, mentre le vibrazioni a basse velocità sono state ridotte del 50% rispetto alla serie CR.
Il sistema di frenata è stato completamente riprogettato e ora utilizza un sistema elettromagnetico, riducendo la precedente distanza di arresto di 10 mm a meno di 1 mm! Un ambiente di lavoro affollato non è più una sfida per i bracci robotici industriali DOBOT e non dovrai più preoccuparti che il robot possa danneggiare te o i tuoi colleghi.
Nuova centralina, gamma di compiti più ampia

Un accessorio essenziale per i bracci robotici collaborativi industriali DOBOT è l’unità di controllo, utilizzata per programmare il braccio robotico e collegarvi vari accessori.
L'interfaccia IO del nuovo controller CC262 è stata aggiornata a 24 pin e la sua interfaccia di comunicazione è stata estesa con 1-1 porte Network e USB aggiuntive. Inoltre, il controller ha supporto RS485, il suo peso è stato ridotto del 20%, il numero di protocolli di comunicazione è stato raddoppiato e il suo livello di rumore è del 20% inferiore!
Il software del controller gira sulla versione 4.x, che lascia spazio a uno sviluppo continuo dell’IDE DobotStudio Pro (Integrated Developer Environment). Questo rende l’interfaccia utente ancora più snella, facile da usare e veloce da comprendere negli aggiornamenti.
Nuova generazione, nuovo modello
Il primissimo modello della serie CRA aggiunge tecnologia innovativa e nuovi parametri all'applicazione dei cobot.
Il CR5A con una capacità di carico di circa 5kg e un raggio d'azione di 900mm, apre la porta all'automazione!
Mantenendo tutti i vantaggi dei bracci robotici collaborativi!
Implementazione flessibile, implementazione rapida
Come con la serie precedente, il sistema può essere configurato in soli 20 minuti ed essere pronto all'uso in un massimo di 1 ora.
Facile da accedere, facile da imparare.

Il software e la tecnologia algoritmica di DOBOT rendono il funzionamento e la gestione della serie di bracci robotici intelligenti e semplici. Grazie al software e all’apprendimento guidato manualmente, è possibile riprodurre con precisione i movimenti umani. Non sono richieste competenze di programmazione.
Sistema di sicurezza avanzato e altro
Il vantaggio dei robot collaborativi è che sono dotati di sensori di pressione nell'alloggiamento, che permettono al robot di interrompere il suo lavoro attuale se la pressione supera una soglia, e il sistema non continuerà finché la pressione non sarà rilasciata. Con questa aggiunta, l'efficienza e la sicurezza del lavoro uomo-robot vengono portate a nuovi livelli.
Strumenti finali
Gli utensili di estremità sono i dispositivi che possono essere montati sulle estremità dei bracci robotici. La serie di robot collaborativi DOBOT CRA è compatibile con un’ampia gamma di utensili di estremità, in modo da soddisfare anche le esigenze più specifiche della tua azienda. Che si tratti di saldatura, pallettizzazione, carico, avvitatura, smistamento, assemblaggio o controllo qualità, qualsiasi processo può essere dotato di pinze a vuoto o elettriche, unità MODBUS per comunicazione e automazione, oppure accessori per nastri trasportatori e unità di visione per massimizzare l’efficienza del braccio robotico.
Parametri

Braccio robotico collaborativo CR5A |
Peso | 25kg | |
Carico massimo ```html
| 5kg
``````html
| |
Raggio di lavoro massimo
``````html
| 900mm
``````html
| |
Velocità massima dell'utensile finale (TCP)
``` | 2 m/s | |
Gamma di Articolazioni | J1 | ±360° |
J2 | ±360° | |
J3 ```html
| ±160°
``` | |
J4 | ±360° | |
J5 | ±360° | |
J6 | ±360° | |
Velocità massima delle giunzioni ```html
| J1/J2
``` | 180°/s |
J3 ```html
| 180°/s
``` | |
J4/J5/J6 ```html
| 223°/s
``` | |
Interfaccia I/O Effettore Finale | DI/DO/AI | 2 |
RS485 ```html
| Supportato |
Precisione ripetuta
``````html
| ±0,02mm
``` | |
Grado di Protezione IP ```html
| IP54
``` | | |
Consumo Energetico ```html
| 120W
``` | |
Rumore | ≤ 70 dB | |
Temperatura di lavoro | 0~50°C | |
Lunghezza del cavo del connettore dell'unità di controllo | 5 m | |
Materiali | Alluminio, plastica ABS |
Unità di Controllo CC262 |
Peso ```html
| 15kg
``` |
Dimensioni (L x A x P) | 400mm x 400mm x 175mm |
Tensione | 100V ~ 240V CA ```html
|
Tensione IO
``` | 24V, Max. 3A, Max. 0,5A per ciascun canale ```html
|
Porte I/O
``` | DI / DO ```html
| 24 canali (NPN e PNP)
``` | |
AI / AO2 ```html
| 2 canali (in modalità tensione o corrente)
``` ```html
|
SI / NO
``` | 10 canali (5 serie configurabili per funzione di sicurezza) |
Interfaccia di comunicazione | Ethernet | 2 (TCP/IP, Modbus TCP, Profinet, Ethernet/IP) ```html
|
EtherCAT
``` | Riservato al controllo degli assi esterni del robot ```html
|
USB
``` | 2 |
RS485 | 1 (per comunicazione ModbusRTU) |
Condizioni operative | Temperatura | 0~50°C | |
Umidità | 0% - 95% (non-condensante) |
Rumore | ≤ 60 dB |
Telecomando | Supportato | |
Grado di protezione IP | Originale: IP20, Opzionale: IP54 ```html
|
Modalità di raffreddamento
``` | Ventilatore ```html
|
Modalità di programmazione
``` | | PC, Smartphone (Android e IOS) |
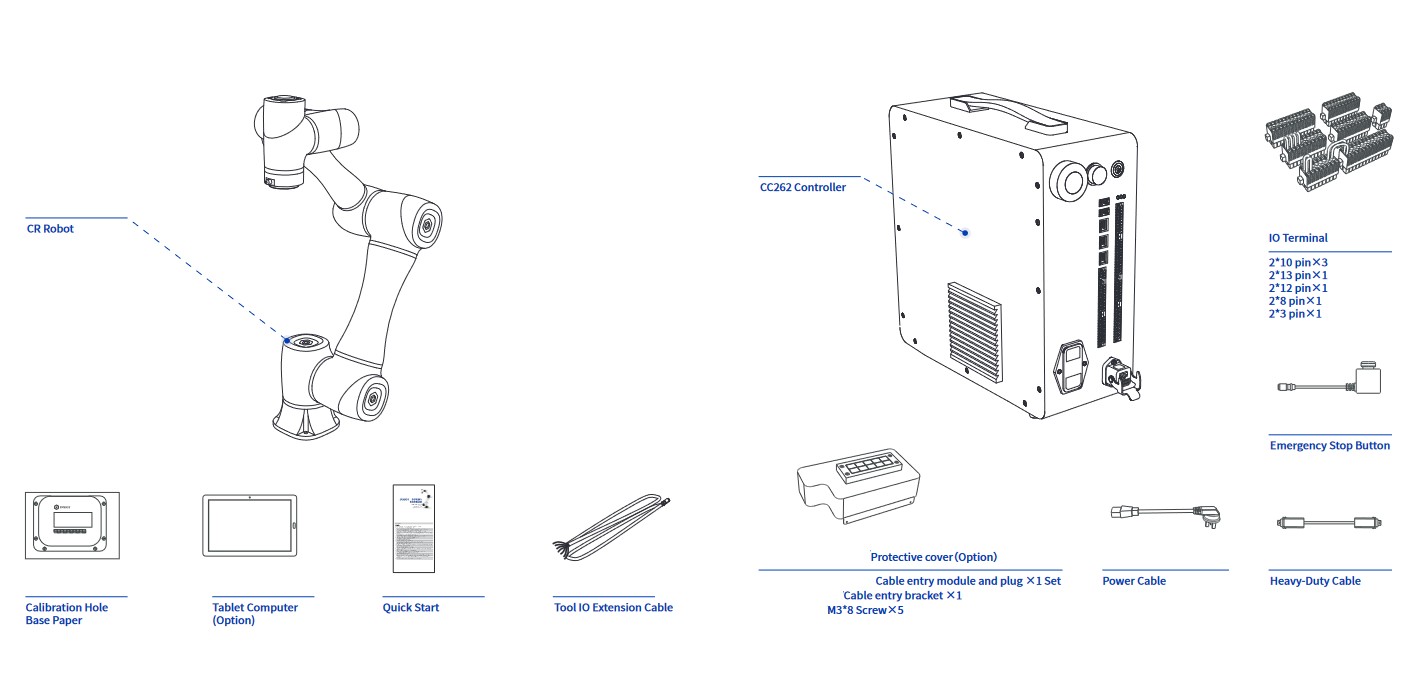
Contenuto del pacchetto
6 assi, 4 modalità di movimento
Il braccio robotico può muoversi dal punto A al punto B collegando due punti di coordinata in 4 modalità:
Movimento Interpolato Articolare: il movimento può essere implementato utilizzando il software GO e MoveJ, che consente al braccio robotico di riposizionarsi da punto A a punto B interpolando l'angolo delle articolazioni del braccio robotico senza tener conto della posizione dello strumento finale
Movimento Interpolato Linearmente: Il movimento può essere implementato tramite Move, che permette al robot di collegare le coordinate del punto A e del punto B, osservando la posizione del cielo, che guida l'attrezzo finale in linea retta. Nel caso del movimento lineare, si può fare una distinzione tra l'utilizzo della modalità salto, in cui l'attrezzo finale sposta i due punti di coordinata alle loro posizioni finali, o applica un arrotondamento per eseguire un movimento continuo, considerando le coordinate del punto.
ARC - Movimento Interpolato Circolare: Il robot collega i punti A e B lungo un arco tramite un punto ausiliario C, eseguendo così un movimento ad arco tenendo conto della posizione dell'utensile finale
Movimento Interpolato Circolare: Cerchio - Il robot collega i punti A e B tramite un punto di supporto C ed esegue il suo movimento descrivendo una forma circolare, tenendo conto della posizione dello strumento finale.
La programmazione può essere fatta in diversi modi. Esempi includono:
Riproduzione del movimento dell'utensile finale: un metodo di programmazione correlato è la programmazione Teach & Playback, un modo di programmare i bracci robotici che non richiede conoscenze di programmazione per impostare i parametri di un compito. Il programmatore può muovere liberamente il braccio robotico premendo e tenendo premuto un pulsante di sblocco della sicurezza, quindi rilasciare il pulsante per stabilizzare il braccio nella posizione data. Nell'interfaccia di programmazione, queste coordinate possono essere visualizzate e memorizzate come punto di coordinata che il braccio robotico deve toccare durante l'esecuzione di un compito. Salvando i punti, è quindi possibile muovere il braccio robotico senza alcuna competenza di programmazione.
Programmazione basata su blocchi (Drag and Drop): anche nota come programmazione grafica, che facilita l'apprendimento della programmazione visualizzando funzioni, variabili e modalità di operazione. Il principio di funzionamento si basa sul collegamento di blocchi, cioè i blocchi che rappresentano ciascuna funzione possono essere programmati in sequenza per programmare il braccio robotico.
Script Python: Grazie alla sua sintassi facile da comprendere e alla sua vasta libreria, viene utilizzato non solo per l'automazione ma anche per lo sviluppo di intelligenza artificiale. Pertanto, la robotica ha scelto Python per massimizzare le capacità dei robot.
DobotStudio, l'ambiente di sviluppo per il braccio robotico, viene fornito di default con le librerie necessarie per controllare il braccio robotico, quindi tutto ciò che devi fare è consultare la documentazione e creare il tuo programma Python per far funzionare il tuo braccio robotico.

Sistemi di coordinate
Il sistema di coordinate del sistema del braccio robotico è diviso in quattro sistemi di coordinate:
Sistema di coordinate di base: il sistema di coordinate di base definisce le coordinate, la posizione e il movimento dell'utensile finale, basandosi sul sistema di coordinate di base, che è definito dal sistema di coordinate cartesiane.
Sistema di coordinate articolari: Il sistema di coordinate articolari è definito dai movimenti possibili di ciascuna articolazione
Sistema di coordinate dell'estremità utensile: Sistema di coordinate che definisce la distanza di compensazione e l'angolo di rotazione, la cui origine e orientazioni variano a seconda della posizione del pezzo sul tavolo del robot
Sistema di Coordinate dell'Utente: Un sistema di coordinate mobile utilizzato per rappresentare attrezzature come attacchi, banchi da lavoro. L'orientamento dell'origine e degli assi può essere determinato in base ai requisiti del sito, per misurare i dati di punti all'interno dell'area di lavoro e per organizzare comodamente le attività