Comprendere i trucchi dell'automazione
Con l'accessorio per Dobot Magician EDU e BASIC
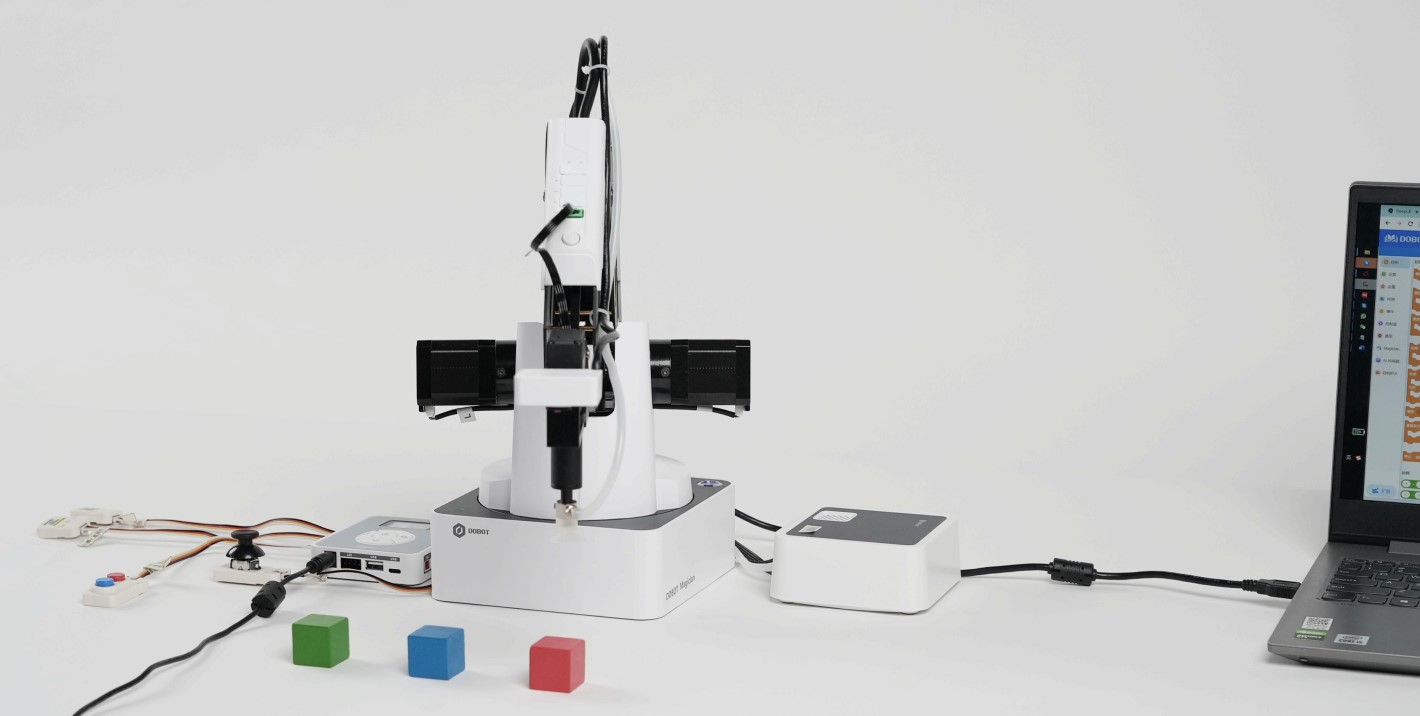
I membri della famiglia di bracci robotici da scrivania includono un ricco ecosistema software, che comprende il linguaggio di programmazione Python e la programmazione grafica. Le loro applicazioni possono essere ulteriormente ampliate con il Sensor Kit, il cui cervello è controllato dall’unità di controllo proprietaria di DOBOT, il controller Magic Box. Con questo kit puoi fare esperienza con il lavoro sugli input, il controllo tramite joystick e persino il posizionamento assistito dall’intelligenza artificiale.
Pratica di ingegneria
I sensori sono in grado di ricevere un’ampia gamma di segnali di ingresso, rendendo il braccio robotico Magician EDU o Basic adatto a simulare quasi qualsiasi operazione di automazione industriale.
Comprendendo i limiti esatti dei sensori, è possibile capire e applicare le basi teoriche per l’assemblaggio dei processi di automazione industriale.
Cavi, Scatola Magica e Porte Sensore sono codificati a colori così puoi imparare l'elemento più importante dell'ingegneria quando usi il pacchetto: il design ingegneristico. La coerenza è una misura fondamentale di qualsiasi buon progetto ingegneristico. Con la codifica a colori, puoi renderlo un compito di routine costruire un sistema facile da capire usando la codifica a colori.
Pensiero logico
Con il Magic Box, il sistema può essere implementato tramite Blocchi e utilizzando il linguaggio di programmazione Python. La documentazione di DobotLab ti aiuterà a imparare dalle basi come funzionano i dispositivi ed esplorare le loro possibilità di programmazione.
La programmazione basata su blocchi (Blockly) aiuta a visualizzare le capacità di esecuzione dei compiti del braccio robotico, supportando allo stesso tempo lo sviluppo delle competenze di programmazione in modo intuitivo per l'utente.
Il linguaggio di programmazione Python è una delle scelte più popolari tra i programmatori. È ampiamente utilizzato per implementare intelligenza artificiale, elaborazione dati e automazione. Per un'esperienza di programmabilità ancora più dettagliata, Dobot ha creato la propria libreria Python che rende programmabile il braccio robotico e tutti i sensori del pacchetto. La grande sfida viene con una grande ricompensa, perché utilizzandola, non solo imparerai a programmare il braccio robotico, ma anche come applicare la sintassi del linguaggio di programmazione Python, il che ti consentirà di fare il primo passo verso la creazione della tua intelligenza artificiale.


Parametri
Joystick
| Modalità di comunicazione | I2C |
| Cavo di cablaggio | Cavo Sensore Universale |
| Valore di uscita X/Y | 10 - 250 |
| Valore di uscita Z | 0 (rilasciato); 1 (premuto) |
| Tensione | 5V |
| Corrente | 50mA |
Doppio Pulsante
| Modalità di comunicazione | IO |
| Cavo di cablaggio | Cavo Sensore Universale |
| Tensione | 5V |
| Valore di output del pulsante | 0 (rilasciato); 1 (premuto) |
| Intensità di corrente | 50mA |
Sensore PIR
| Comunicazione | IO |
| Cavo di cablaggio | Cavo Sensore Universale |
| Distanza di rilevamento | 150cm |
| Periodo di ritardo | 2s |
| Campo di induzione | <100° |
| Corrente statica | <60uA |
| Temperatura di esercizio | -20 ~ 80°C |
| Tensione | 5V |
| Corrente | 50mA |
Sensore di Gesti
| Modalità di comunicazione | I2C |
| Cavo di cablaggio | Cavo Sensore Universale |
| Gesti supportati | Su, Giù, Destra, Sinistra, Avanti, Indietro, In senso orario, In senso antiorario |
| Distanza di riconoscimento efficace | 5 - 15cm |
| Tensione | 5V |
| Corrente | 50mA |
Sensore Fotoelettrico
| Modalità di comunicazione | IO |
| Cavo di cablaggio | Cavo Sensore Universale |
| Gamma di valori | 0 (senza schermo); 1 (con schermo) |
| Ambiente di rilevamento standard | Luce solare inferiore a 10000LX, lampada a incandescenza inferiore a 3000LX |
| Oggetto da rilevare | oggetto trasparente o opaco |
| Temperatura operativa | -25 ~ 55°C |
| Tempo di risposta | <2ms |
Sensore Sonoro
| Modalità di comunicazione | ADC |
| Cavo di collegamento | Cavo Sensore Universale |
| Intervallo di valori | 0 ~ 1023 |
| Sensibilità | (48dB ~ 52dB) @ 1kHz |
| Impedenza del microfono | 2.2k ohm |
| Frequenza del microfono | 16 ~ 20 kHz |
| SNR S/N | 54dB |
Sensore di Umidità
| Modalità di comunicazione | I2C |
| Cavo di collegamento | Cavo Sensore Universale |
| Intervallo di temperatura | 0 ~ 60°C/±1°C |
| Intervallo di umidità | 10 ~ 90% RH ±5%RH |
| Tensione | 5V |
| Corrente | 50mA |
Sensore di Colore
| Modalità di comunicazione | I2C |
| Cavo di collegamento | Cavo Sensore Universale |
| Risultato rilevamento colore | 0 (nessun colore); 1 (rosso); 2 (verde); 3 (blu); 4 (giallo); 5 (nero); 6 (bianco) |
| Valore colore RGB | 0-200 (un valore maggiore indica un colore più scuro) |
| Tensione | 5V |
| Corrente | 50mA |
Modulo LED
| Modalità di comunicazione | Monobus |
| Cavo di cablaggio | Cavo Sensore Universale |
| Gamma RGB | 0 ~ 100% |
| Tensione | 5V |
Sensore di Luce
| Modalità di comunicazione | I2C |
| Cavo di collegamento | Cavo Universale Sensore |
| Risultato Rilevamento Colore | 0 (nessun colore); 1 (rosso); 2 (verde); 3 (blu); 4 (giallo); 5 (nero); 6 (bianco) |
| Valore colore RGB | 0-200 (un valore maggiore indica un colore più scuro) |
| Tensione | 5V |
| Corrente | 50mA |
Potentiometro a manopola
| Tensione di uscita | 0 ~ 2500mV |
| Modalità di comunicazione | ADC |
| Cavo di collegamento | Cavo sensore universale |
| Valore di ritorno della luminosità | 0 ~ 407 (fluttuazione estrema è normale) |
| Tensione | 5V |
| Corrente | 50mA |
Micro servo
| Modalità di comunicazione | PWM |
| Cavo di cablaggio | Cavo Sensore Universale |
| Velocità del servo | 0.1mp/60°/4.8V; 0.09mp/60°/6.0V |
| Coppia | 1.6kg*cm/4.8V; 1.8kg*cm/6.0V |
| Frequenza PWM | 50Hz/0.5~2.5MS |
| Tensione | 4.8V - 6.0V |
| Corrente senza carico | 60mA |
Telecamera AI
| Dimensioni | 50mm x 44mm x 25mm |
| CMOS | 1/4inch |
| Pixel immagine | 1M |
| Formato immagine | YUV/MJPG |
| Formato dati | 240*320 // 640*480 // 1280*720 |
| Massima velocità di elaborazione dell'immagine | 1280*720@30fps |
| Impostazioni della fotocamera | Saturazione, contrasto, nitidezza |
| Bilanciamento del bianco | Auto |
| Esposizione | Auto |
| Temperatura operativa | 0 ~ 50°C |
| Tensione | 5V |
| Interfaccia | USB2.0 |
| Ingresso audio | Microfono integrato |
| Angolo di funzionamento della fotocamera | 0 ~ 135 |
| °Funzionalità | riconoscimento facciale, riconoscimento delle immagini, riconoscimento del testo OCR, riconoscimento vocale, ecc. |
Magic Box
| MCU | ARM 32-bit Cortex-M4 |
| Comunicazione | Porta seriale virtuale USB/porta seriale/Bluetooth |
| Frequenza principale | 168 MHz |
| Linguaggio di programmazione | MicroPython |
| Tensione | 100V - 240V AC, 50/60Hz |
| Software | DobotStudio/DobotLab |
| Tensione di ingresso | 12V == 5A DC |
| Peso | 98g |
| Temperatura di esercizio | -5°C ~ 45°C |
| Dimensioni | 95mm x 80mm x 21.5mm |
| Potenza | Massimo 60W |
Contenuto della confezione

- 1 pz Joystick
- 1 pz Pulsante doppio
- 1 pz Sensore PIR
- 1 pz Sensore di gesti
- 1 pz Sensore fotoelettrico
- 1 pz Sensore sonoro
- 1 pz Sensore di temperatura e umidità
- 1 pz Sensore di colore
- 1 pz Modulo LED
- 1 pz Sensore di luce
- 1 pz Potenziometro a manopola
- 1 pz Micro servo
- 1 pz Telecamera AI
- 1 pz Magic Box