DOBOT COBOT CR10S
Kollaborative robotică industrială echipată cu accesoriul SafeSkin
CR10S este cheia pentru o colaborare sigură între om și robot. Brațul robotizat CR10S, conceput cu ajutorul accesoriului DOBOT SafeSkin, este proiectat pentru a simplifica liniile de automatizare și pentru a oferi un nivel înalt de siguranță pentru oameni.
Dobot CR10S este inclus în clasa de dimensiuni medii a roboților industriali, dimensiunile compacte și capacitatea sa de încărcare de 10 kg permițând automatizarea largă a producției cu ajutorul brațului robot. Se pot utiliza o mare varietate de instrumente finale pentru diferite tipuri și domenii de aplicare, ceea ce îl face un instrument extrem de util în toate domeniile industriale. În plus, este excelent pentru utilizare în domeniul instruirii și al învățământului superior, precum și în domeniul stocării, simulării producției și multe altele.
INSTALARE FLEXIBILĂ, EXECUȚIE RAPIDĂ
Îmbunătățiți flexibilitatea și eficiența producției cu ajutorul unui robot colaborativ CR, ușor de instalat, pe care îl puteți asambla și utiliza în doar 20 de minute. După conectarea consolei de control și fixarea brațului robot, trebuie doar să le conectați, apoi să porniți sistemul.
ACCES UȘOR, UȘOR DE ASIMILAT

Software-ul și tehnologia aritmetică a lui Dobot fac funcționarea și gestionarea seriei de roboți colaborativi CR inteligente și ușoare. Datorită software-ului și învățării manuale, poate imita precis mișcările umane. Nu este nevoie de cunoștințe de programare. Acest lucru este facilitat de mediul său de dezvoltare bazat pe blocuri, care nu necesită învățarea utilizării bibliotecilor complexe de programare și a funcțiilor.
În cazul în care aveți deja cunoștințe de programare, sistemul robotului suportă limbajul de programare Python, astfel încât puteți valorifica toate avantajele robotului.
Tehnologia SafeSkin - Utilizarea inducției electromagnetice
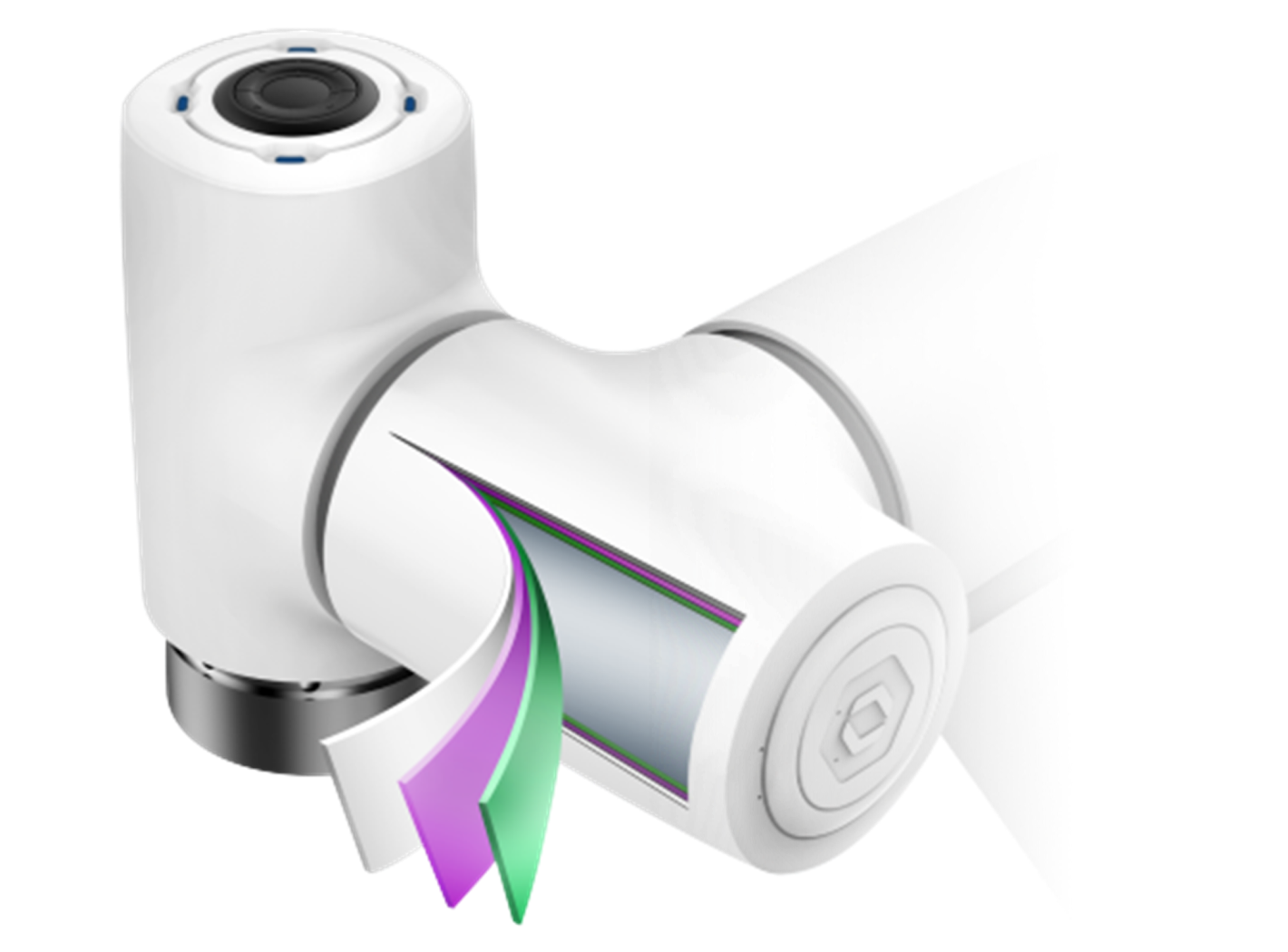
DOBOT este o companie care dezvoltă propriul sistem de securitate la locul de muncă, care nu numai că previne accidentele, ci și le anticipatează. Prin intermediul inducției electromagnetice, o carcasă de silicon echipată cu senzori asigură atenția asupra mediului înconjurător a robotului. Carcasa creează un câmp electromagnetic de-a lungul acoperișului robotului, pe care orice obiect străin aflat în mediul sau în mișcare îl distruge, astfel trimițând un semnal la unitatea de procesare centrală a robotului. În acest fel, robotul se oprește imediat.
Funcționarea sa este suspendată până când integritatea câmpului magnetic nu este restabilită, adică obiectul străin nu părăsește mediul imediat al robotului. După eliberarea rutei de funcționare, robotul își continuă automat munca fără a periclita procesul de producție.
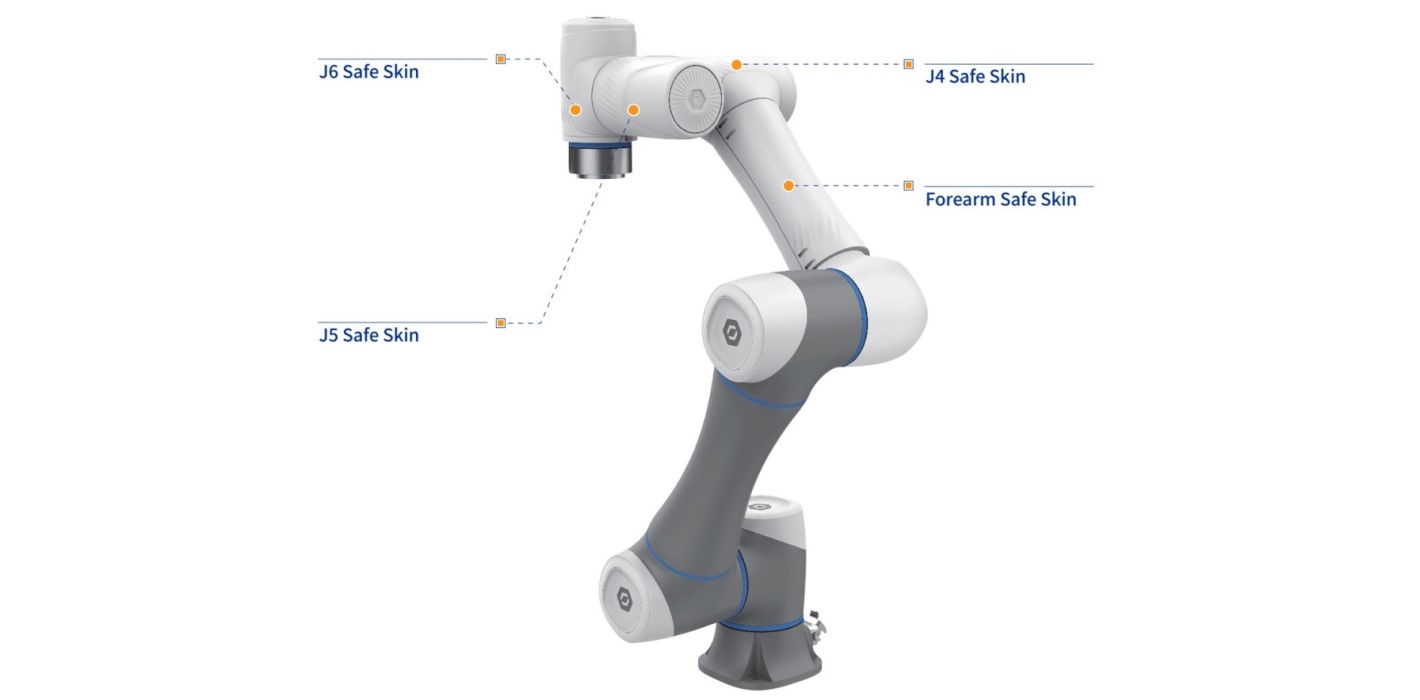
Pachetul SafeSkin conține 4 unități de acoperire. Acoperă încheietura antebrațului, încheietura J4, încheietura J5 și încheietura J6.
În funcție de diferitele materiale, sensibilitatea percepției variază. În timp ce pielea umană se află la cea mai înaltă nivel (este cea mai sensibilă acoperire), plasticul se află la nivelul cel mai scăzut. Parametrii legați de prevenire, cum ar fi accelerația și viteza, pot fi ajustați în programul dezvoltatorului robotului.
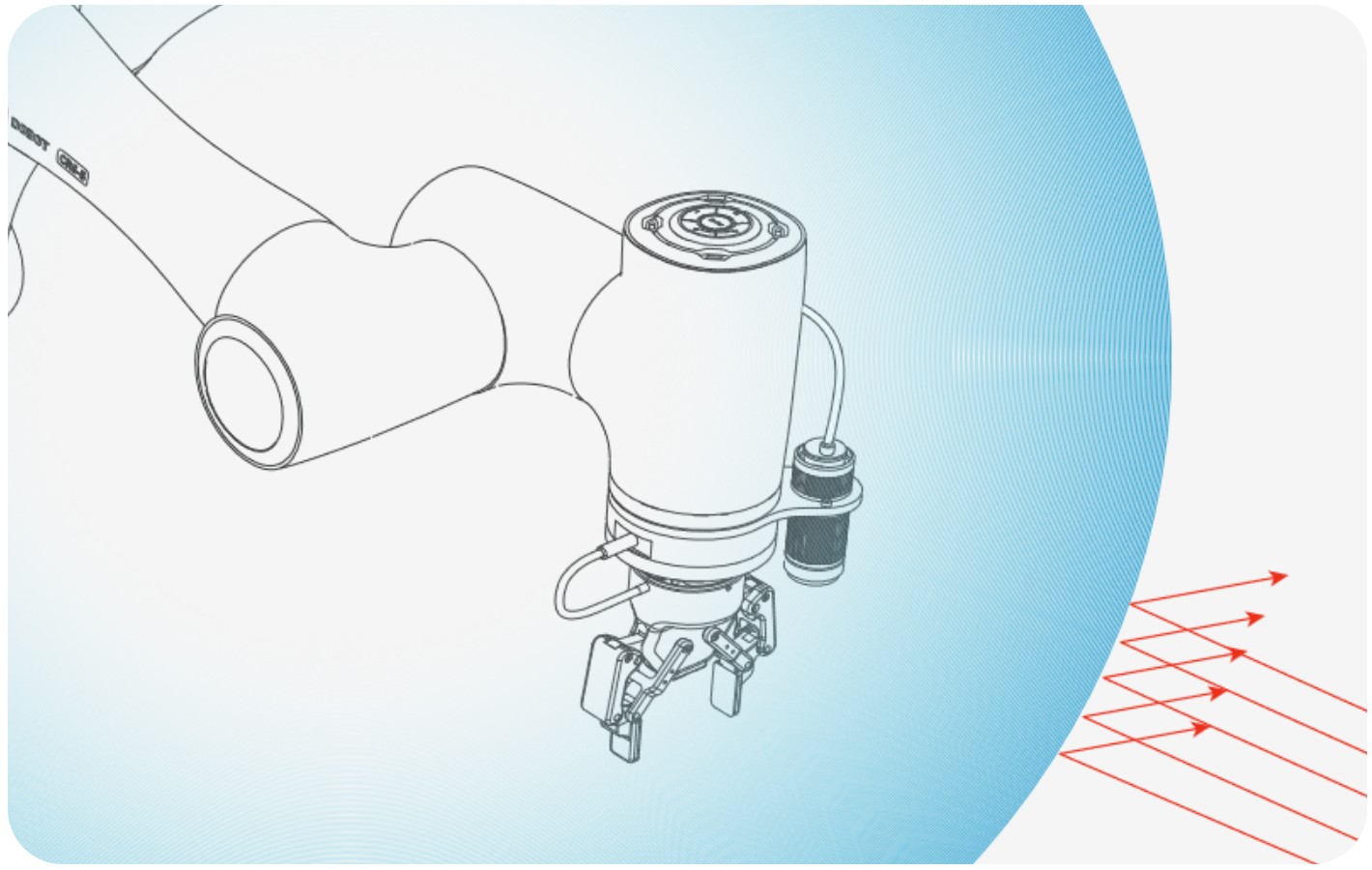
Extensibil, compatibil
Seria de roboți colaborativi CR este recomandată datorită gamei largi de instrumente finale disponibile și a interfeței universale de comunicare. Seria de roboți colaborativi CR cu mai multe I/O și interfețe de comunicare poate fi extinsă în mod flexibil și este compatibilă cu numeroase dispozitive de prindere la capătul brațului. Ca rezultat, roboții colaborativi CR pot satisface o varietate de cerințe și pot fi utilizați în diferite situații de aplicare.
Principalele caracteristici
Denumire produs |
DOBOT CR10S |
Greutate |
40kg |
Greutatea utilă maximă |
10 kg |
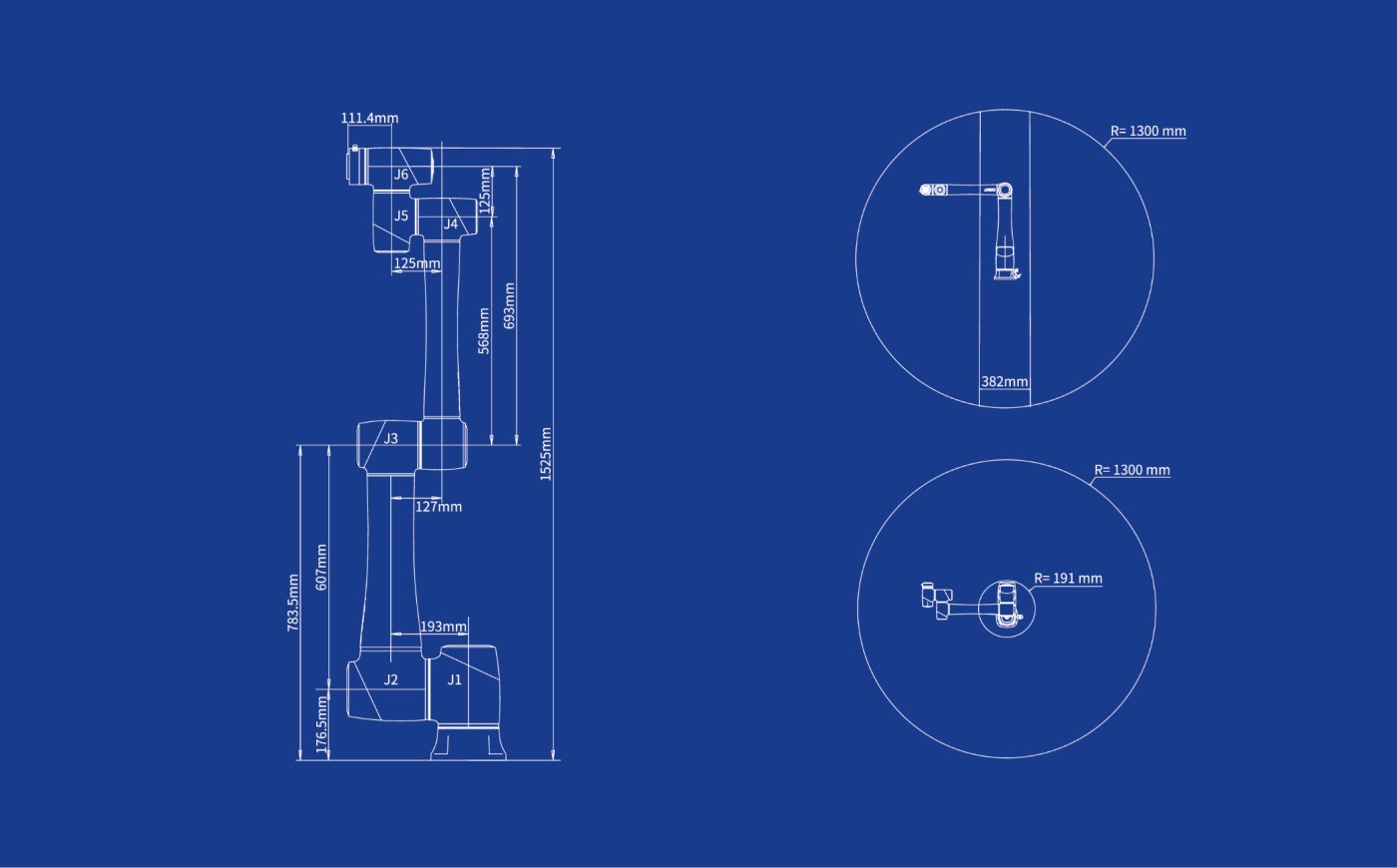
Distanța maximă de acțiune |
1525mm |
Tensiune nominală |
DC48V |
Viteza maximă de tragere |
4m/s |
Rănirea articulațiilor |
J1 |
±360° |
J2 |
±360° |
J3 |
±160° |
±160° |
±160° |
±160° |
J4 |
±360° |
J5 |
±360° |
J6 |
±360° |
Maximă viteză a articulațiilor |
J1/J2 |
120°/s |
J3/J4/J5/J6 |
180°/s |
Interfețele I/O ale sistemului final |
DI/DO/AI |
2 |
AO |
0 |
Interfață de comunicare |
Comunicare |
RS485 |
Control I/O |
I/O de control |
I/O de control |
DI |
DI |
DI |
16 |
DO/DI |
16 |
Inteligență Artificială/Interfață Analogă |
2 |
Encoderul incremental ABZ |
1 |
1 |
Precizia de repetare |
±0,03mm |
Comunicare |
TCP/IP, Modbus, EtherCAT, WIFI |
Standardul IP |
IP54 |
Temperatura de lucru |
0~45° |
Putere |
350W |
Materiale |
Aliaj de aluminiu, plastic ABS |
Instrumente de finisare 
Finițele sunt dispozitivele care pot fi montate la extremitatea brațului roboților. Seria de roboți colaborativi DOBOT CR este compatibilă cu o gamă largă de finițe, astfel încât să poată satisface chiar și cele mai specifice nevoi ale afacerilor. Fie că este vorba de sudură, paletizare, manipulare, înșurubare, sortare, asamblare sau control de calitate, sunt disponibile cleme cu vacuum sau funcționare electronică, unități MODBUS pentru comunicație și automatizare, sau accesorii comozi, cum ar fi benzi transportoare și unități vizuale, care permit brațului robot să atingă performanțe de vârf. Iată câteva exemple:
- Ambalare și paletizare
- Manipulare
- Lustruire
- Înșurubare
- Lipire, dozare și sudură
- Asamblare
- Operare mașină
- CNC
- Control calitate
- Turnare prin injecție
Conținutul Pachetului
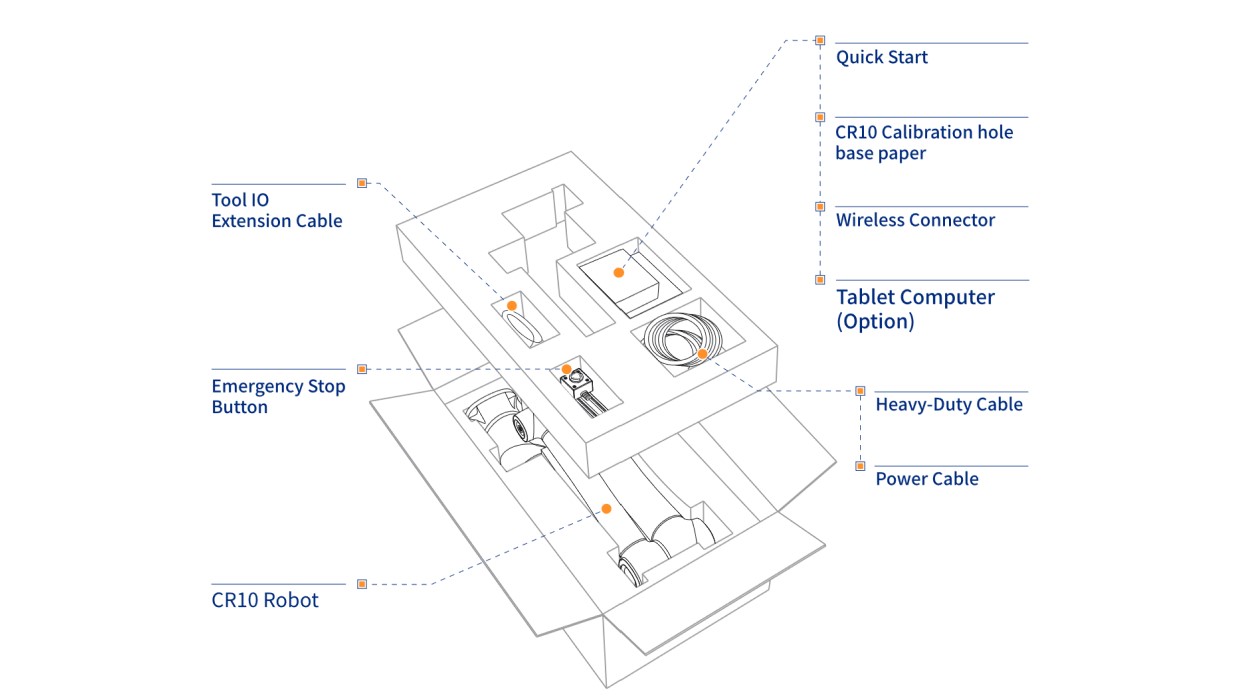
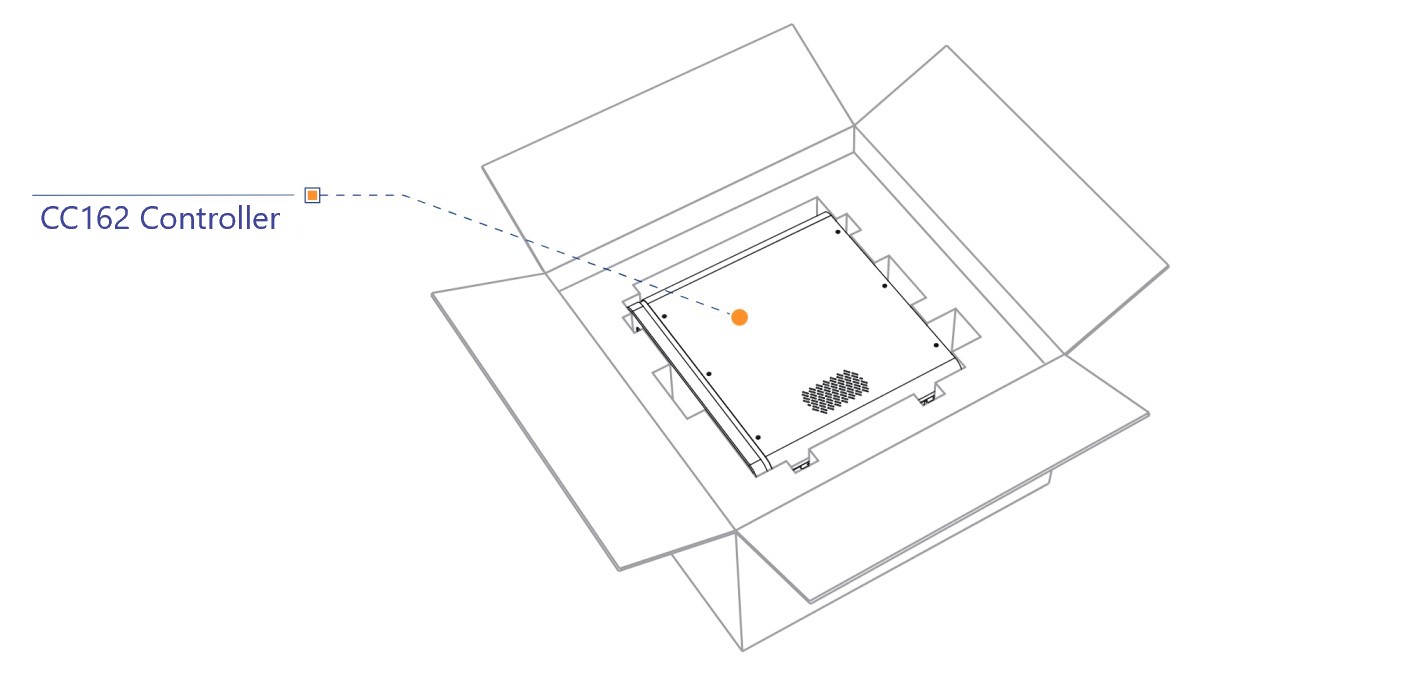
Un braț robotic este format din două unități. Un braț robotic și o unitate de control necesară programării acestuia. Unitatea de control este un computer care, comunicând cu brațul robotic, poate să-l controleze. Unitatea de control dispune de porturile IO la care se pot conecta diferite accesorii, inclusiv un comutator de oprire de urgență. Pentru a stabili comunicarea cu calculatoarele sau dispozitivele inteligente ale dumneavoastră, unitatea de control dispune de un port USB la care se poate conecta un modul WIFI și un conector Ethernet, în cazul în care doriți să direcționați și să programați brațul robotic prin conexiune cablată.
*Apăsarea comutatorului de oprire de urgență va duce la oprirea imediată a funcționării brațului robotic.
Pe lângă cele două unități, pachetul conține cablurile de alimentare ale unităților și cablul IO necesar conectării.
Acestea includ și accesoriul SafeSkin!
Modurile de mișcare ale unui robotkar
Un braț robotic poate să se deplaseze de la punctul A la punctul B unind două puncte de coordonate în 4 moduri:
Mișcare interpolată la articulații: Mișcarea se poate realiza prin programul GO și MoveJ, datorită căruia, fără a ține cont de poziția sculei finale, se intervine în mod interpolat asupra unghiurilor articulațiilor brațului robotic pentru a schimba poziția din punctul A în punctul B
Mișcare interpolată liniar: Mișcarea se poate realiza prin programul Move, datorită căruia robotul, evaluând poziția sculei finale, unește coordonatele punctelor A și B, conducând scula finală de-a lungul unei linii drepte. În cazul mișcării liniare se poate diferenția utilizarea modului de săritură, în timpul căruia scula finală fie se deplasează până la punctele de coordonate, fie aplică rotunjiri pentru a executa o mișcare continuă, ținând cont de coordonatele punctelor.
ARC - Mișcare interpolată circulară: Robotul unește punctele A și B cu ajutorul unui punct intermediar C de-a lungul unui arc, executând astfel o mișcare arcuită, în care se ia în considerare poziția sculei finale
Cerc - Mișcare interpolată circulară: Robotul unește punctele A și B cu ajutorul unui punct intermediar C descriind o figură circulară, având în vedere poziția sculei finale
Sisteme de coordonate
Un sistem de coordonate pentru un braț robotic este împărțit în patru sisteme de coordonate:
Sistemul de coordonate al bazei: Sistemul de coordonate al bazei determină coordonatele, poziția și mișcarea uneltei finale, pe baza sistemului de coordonate al bazei, care este determinat de un sistem de coordonate cartezian.
Sistemul de coordonate al încheieturii: Sistemul de coordonate al încheieturii este determinat de posibilitățile de mișcare ale fiecărei încheieturi.
Sistemul de coordonate al uneltei finale: Un sistem de coordonate care determină distanța de deplasare și unghiul de rotație, al cărui origine și orientări variază în funcție de poziția piesei de lucru aflate pe suprafața robotului.
Sistemul de coordonate al utilizatorului: Un sistem de coordonate mobil, utilizat pentru reprezentarea echipamentelor, cum ar fi mobilierul și bancurile de lucru. Originea și orientarea axelor pot fi determinate în funcție de cerințele locației, pentru măsurarea punctelor din zona de lucru și aranjarea convenabilă a sarcinilor.
Puncte de singularitate
Când robotul se mișcă în sistemul de coordonate cartezian, viteza rezultantă a celor două axe nu poate fi oricare în direcții, dacă direcțiile sunt aliniate, ceea ce duce la o degradare a gradelor de libertate ale robotului.
Robotul are trei puncte de singularitate.
Investiție sigură, fiabilitate deosebită
Seria de brațe robotizate colaborative CR oferă o construcție puternică și stabilă, promițând o durată de viață de până la 32.000 de ore, iar costurile de operare reduse sunt, de asemenea, caracteristice. Astfel, membrii seriei CR nu sunt doar solide, ci și investiții profitabile.
